Efficient solvers for Richards' equation, 2023
Jakob Seierstad Stokke
Main content
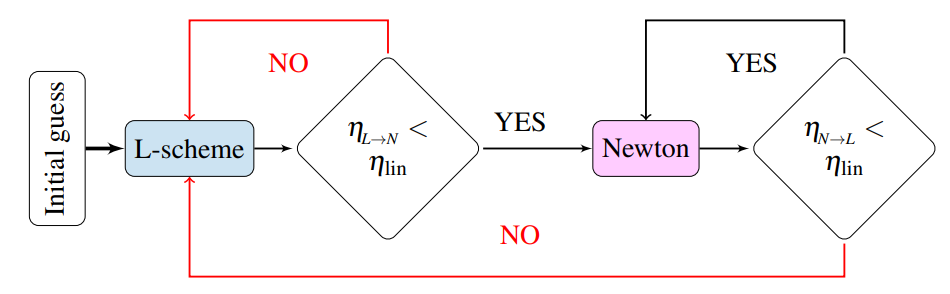
In this thesis we have sought to solve Richards’ equation. In time we applied a backward Euler discretization and in space we used a continuous Galerkin finite element discretization. The focal point was how to efficiently solve the resulting non-linear problem. We considered several linearization techniques, the L-scheme, the modified L-scheme and Newton’s method and also Anderson acceleration applied to the L-scheme and Newton’s method. For the L-scheme we gave a convergence proof and extended the previously existing optimality analysis to include the gravity term. In addition, we also gave an error estimate on the solution of the L-scheme. For Newton's method applied to a variant of Richards' equation after Kirchhoff transformation, we also proved the quadratic convergence if the initial guess is sufficiently close. We proposed an adaptive algorithm between the L-scheme and Newton’s method. This way we utilized the quadratic convergence of Newton’s method when it converges and the robustness of the L-scheme. In order to determine when to switch between the two schemes, we derived reliable and efficient {\it a posteriori} indicators which predict the linearization error of the subsequent iteration. The algorithm always starts using the L-scheme, and at every iteration checks to see if the linearization error is predicted to decrease by switching to Newton’s method. If this is the case, then Newton’s method is used, otherwise the L-scheme is used for the next iteration. Hence, the adaptive scheme is now robust and quadratically convergent after switching to Newton’s method. The proposed algorithm is assessed on realistic examples. They demonstrate that the algorithm is as robust as the L-scheme and converges even when Newton's method fails. Furthermore, when Newton converges, the hybrid scheme takes roughly the same number of iterations and computational time as Newton's method while being significantly faster than other linearization and acceleration techniques.
Advisors
Florin A. Radu
Jakub W. Both